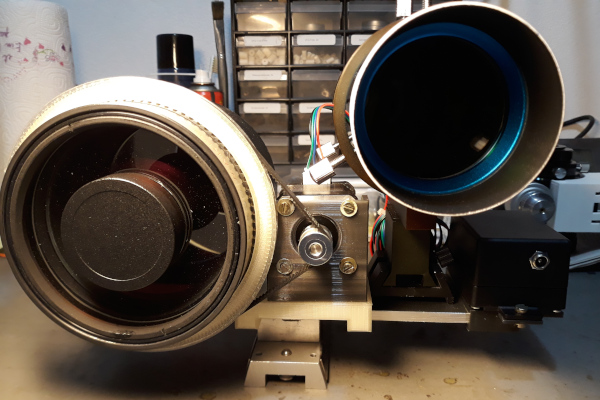
Mit dem Rubinar 500/5,6 kann man ganz nette Fotos machen. Im Zuge der "automatischen Astrofotografie" hat mir in diesem Zusammenhang aber noch ein motorisierter Fokussierer gefehlt.
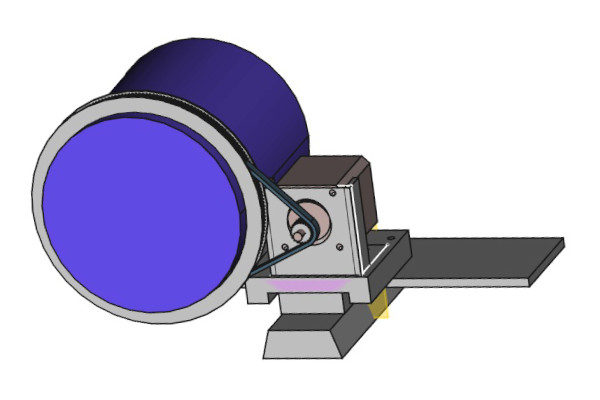
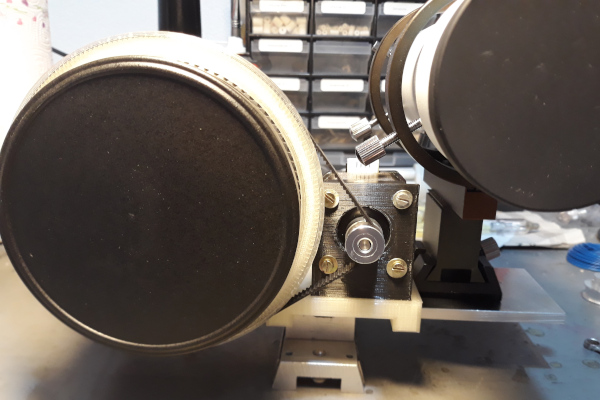
Die Alu-Grundplatte mit Bohrungen für die Objektive und Prismenschine war vorhanden. Ebenso waren Elektronik und Schrittmotor bereit (USB-Fokussierer). Gefehlt hat allerdings der Antrieb des des Fokussierrades bzw. dessen Verbindung mit dem Schrittmotor. Freecad 19 erlaubt es, Zahnräder unterschiedlichster Geometrie zu generieren. Somit war es möglich, ein GT2-Zahnrad zu konstruieren, das sich auf den Fokustrieb des Objektiv schieben lässt. Der innere Durchmesser wurde so gewählt, dass es schon recht fest sitzt. Zusätzlich sind drei M3-Madenschrauben eingebaut, die das Ganze nochmal sichern sollen. Der NEMA17-Motor sitzt in einer Halterung, die verschiebbar auf einem Unterbau befestigt ist. Dieser wiederum ist mit der Alu-Grundplatte verschraubt. Die Bohrungen für die Senkkopfschrauben sind knapp bemessen, damit die Schrauben fest sitzen und die Muttern von oben mit einem schmalen Maulschlüssel angezogen werden können. Der Zahnriemen bleibt so unter leichter Spannung.
Der Fokus-Trieb des Objektivs ist relativ schwergängig. Aus diesem Grund muss die Beschleunigung möglichst gering eingestellt werden, so dass der Motor sehr langsam anläuft. Der INDI-Treiber (Moonlite, K-Stars und EKOS) ist hier wirkungslos. Allerdings kann dies im ino-Skript bequem eingestellt werden. Arduino Nano und Easydriver finden in einem Kleingehäuse Platz und werden an einer freien Stelle der Grundplatte befestigt. Hierzu wurde eine Halteklammer konstruiert, die perfekt auf die Alu-Schine passt und nicht weiter befestigt werden muss.